Auto Balancing Case

An auto-balancing suitcase that dynamically adjusts its center of mass to reduce wrist torque and improve user comfort on uneven surfaces.
Developed through an end-to-end pipeline, covering hardware fabrication, sensing, reinforcement learning, Sim2Real transfer, and real-time control.
All design files, simulation environments, and reinforcement learning policies are fully open-sourced.
🔗 Source Code
Problem & Motivation
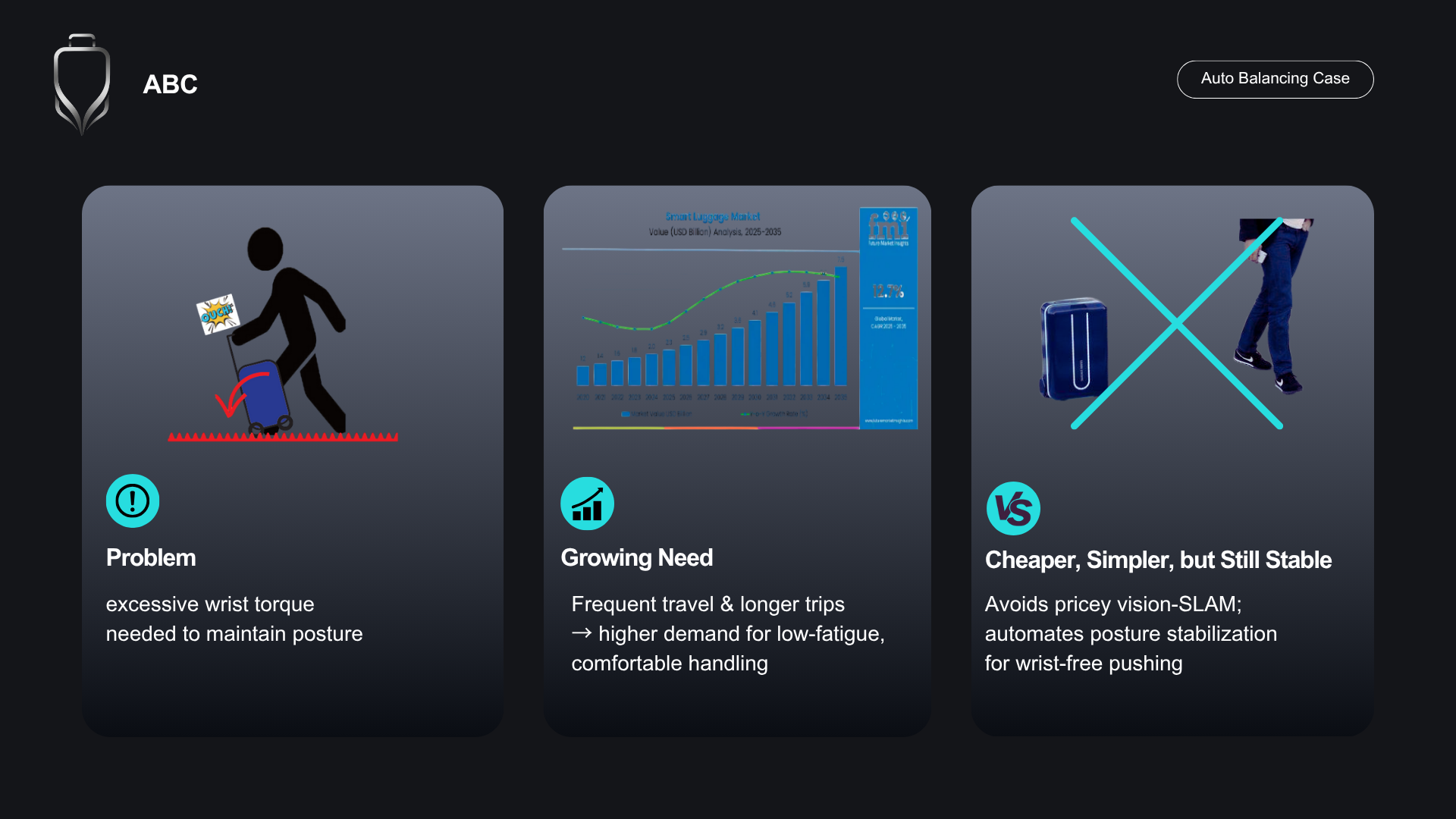
Conventional suitcases often tilt forward on carpets, ramps, and uneven surfaces, requiring users to apply excessive wrist torque to maintain posture.
As suitcase use increases with frequent travel and long-distance mobility, the demand for reduced user fatigue and improved handling comfort continues to grow.
Unlike existing autonomous suitcases that rely on costly and complex vision based SLAM systems, this project focuses on automating posture stabilization-allowing users to simply push the suitcase without exerting extra wrist effort.
Solution Concept
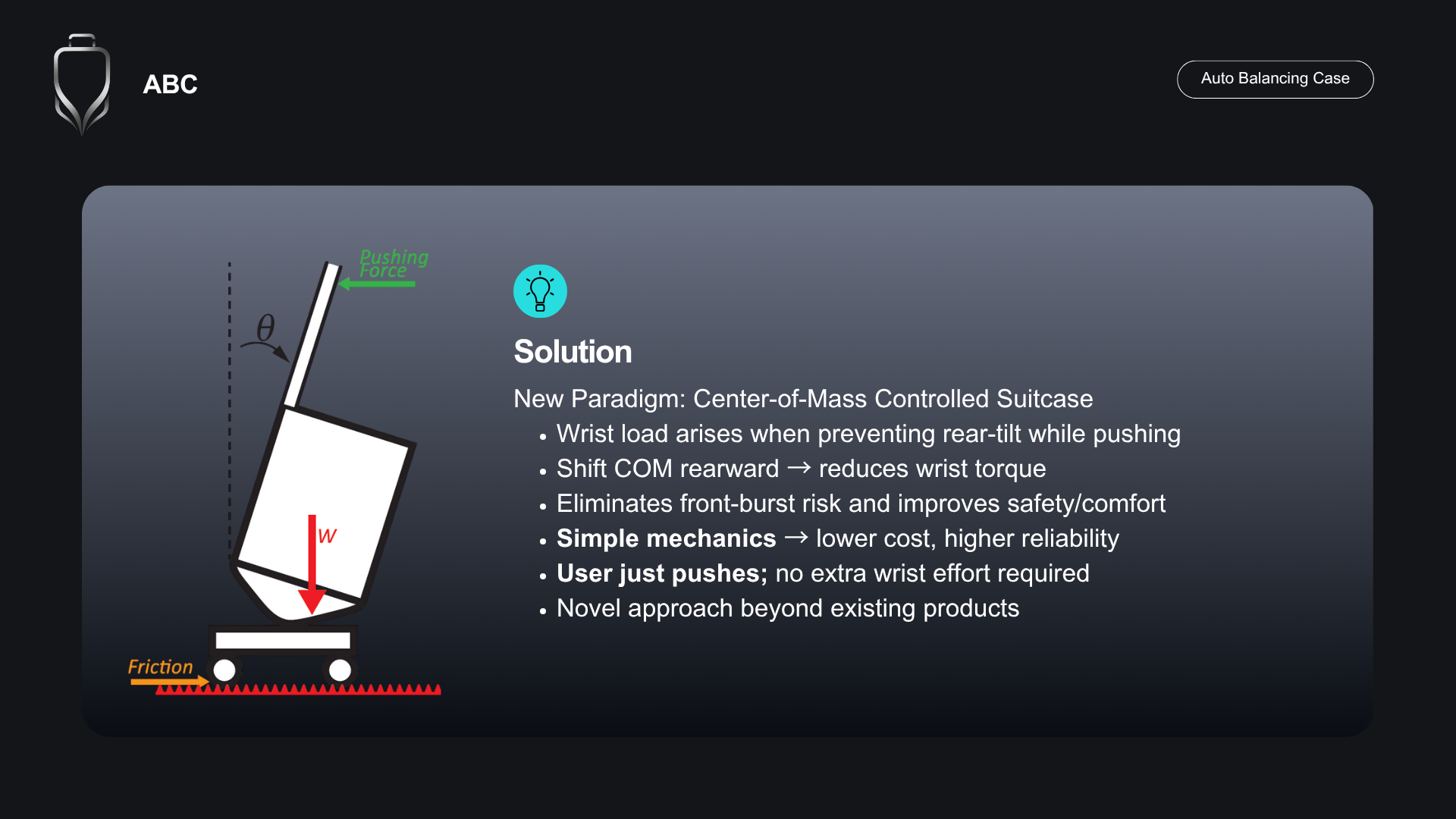
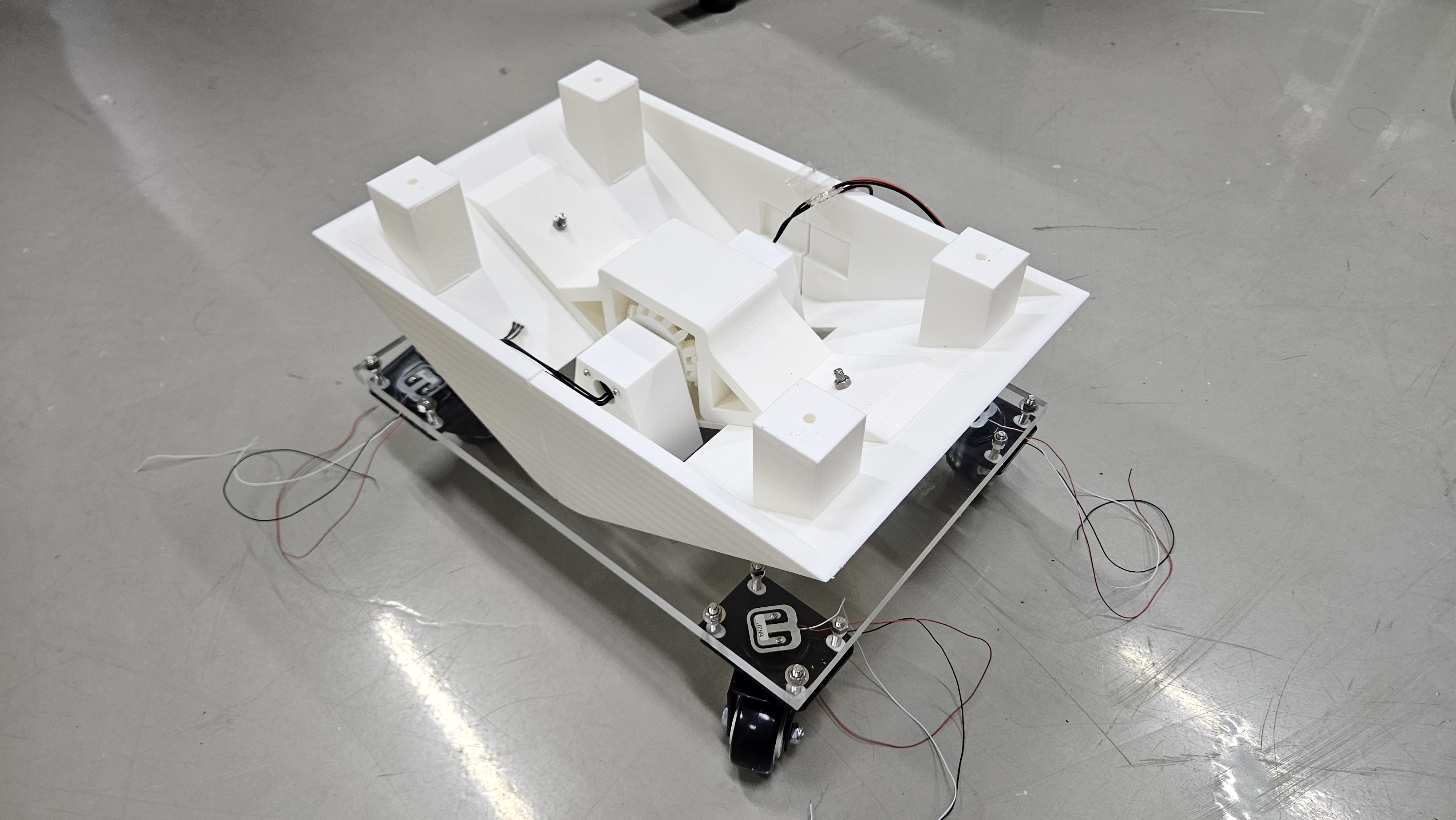
Introduced a mass-shifting upper body design that moves the luggage’s center of gravity rearward during pushing.
By preventing initial tipping, the design eliminates the need for users to apply wrist torque to maintain balance.
Unlike complex self-driving suitcases, this design maintains simplicity while enhancing ergonomic comfort and stability.
Hardware Development
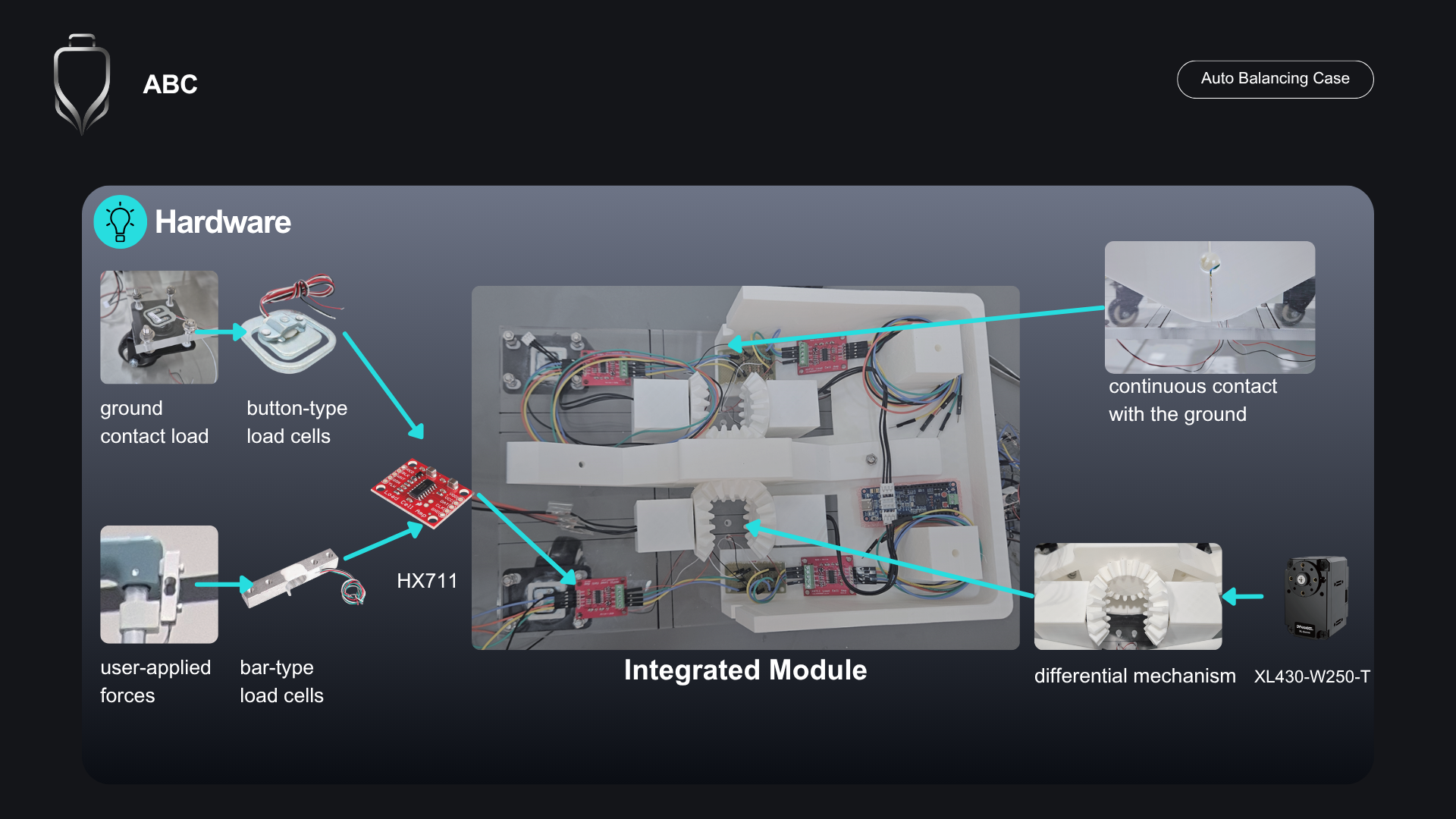


Sensor Design
- Four button-type load cells mounted at each wheel measure ground contact load.
- Two bar-type load cells in the handle measure user-applied forces.
- All signals are amplified via HX711 modules for precise data acquisition.
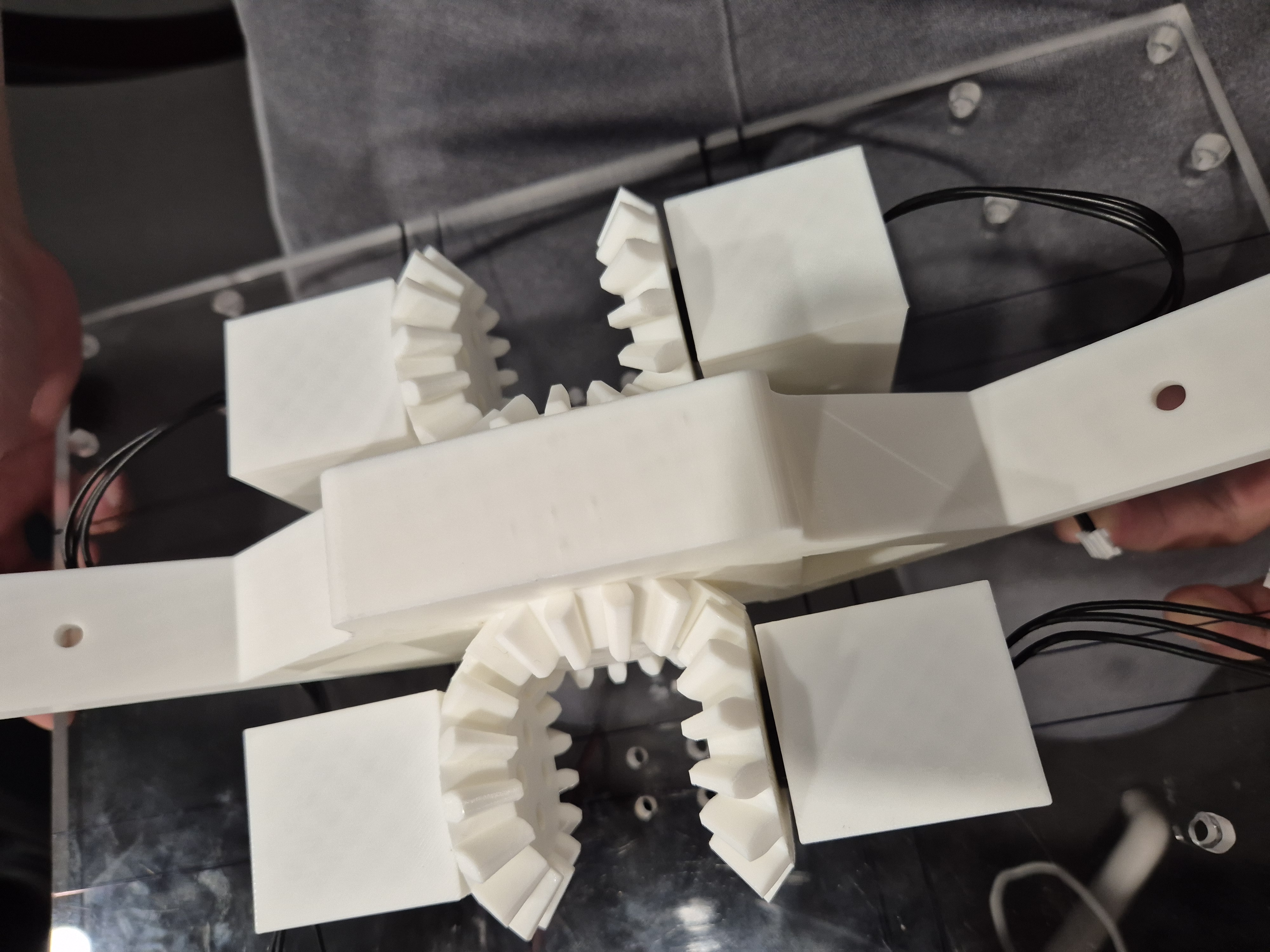
Actuator Design
- Dual Dynamixel XL430-W250-T motors connected via a differential gear to generate a single controlled tilt angle.
- Base structure remains in continuous contact with the ground, minimizing axial load on the actuators.
Reinforcement Learning
- Simulation Environment: Built using NVIDIA PhysX-based Isaac Sim with custom CAD-to-URDF/USD modeling.
- Framework: NVIDIA Isaac Lab + RSL-RL Agent (PPO Runner).
- Training Strategy: Domain Randomization + Custom Reward (posture stability, balanced wheel loads).
- Outcome: Learned robust control policies for balancing under disturbances and slope conditions.
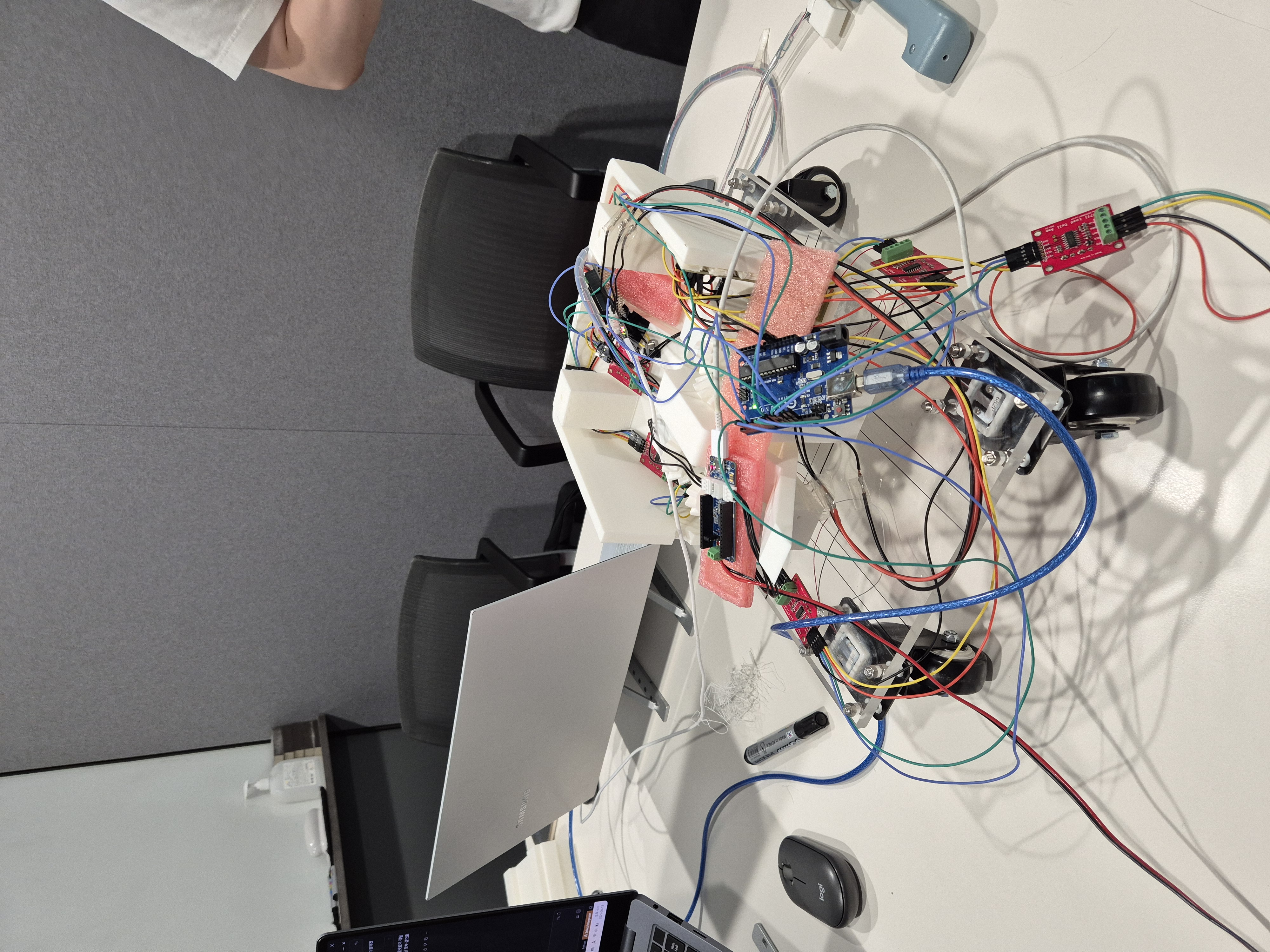
Sim2Real Transfer

- Sensor Interface: Real-time load sensing via Arduino + HX711.
- Motor Control: Low-level actuation with Dynamixel SDK.
- Policy Integration: Hardware I/O bridged to match the trained policy’s input/output format.
- Gap Mitigation: Addressed delay, noise, and frequency mismatches for stable real-world transfer.
Control Loop

The RL-based controller operates at 50 Hz, continuously reading sensor inputs, running the learned policy, and outputting real-time motor commands.
This feedback loop maintains upright stability during start, stop, and uneven-surface transitions.
Results


- Test users reported no need for additional wrist torque, resulting in clearly lower handling effort on rough terrains.
- Demonstrated smooth center-of-mass adjustment and responsive recovery during external disturbances.
- The modular design can be embedded into existing suitcase frames, allowing scalable manufacturing and product integration.
- Advanced to the finals of the 14th SNU Creative Design Fair.
Future Work
Potential extensions include quantitative evaluation of handling-effort reduction and expanded application to carts and logistics platforms.
